Nishcorp Internship – Autonomous Stair-Climbing Wheelchair Simulation
About Nishcorp Technologies
Nishcorp Technologies is a robotics startup focused on developing innovative mobility solutions. During my internship, I contributed to their flagship project: an autonomous wheelchair capable of climbing stairs. This project was pivotal in helping the startup secure grants totaling ₹13 lakh for further development.
Project Overview
My main responsibility was to take a provided CAD model of the stair-climbing wheelchair and bring it to life in simulation. The goal was to validate the design, test its kinematics, and demonstrate its capabilities in both virtual and physical environments.
- Imported the CAD model into Gazebo for simulation.
- Applied kinematics to determine joint angles and movement feasibility.
- Simulated the robot in both Gazebo and RVIZ, including teleoperation.
- Added sensors and actuators in the simulation, including an IMU plugin for realistic sensor data.
- 3D printed custom parts and helped assemble the half-scale physical model, which could sit and stand.
- This half-scale prototype was used by Nishcorp to demonstrate the concept and secure significant startup funding.
Simulation & Assembly Media
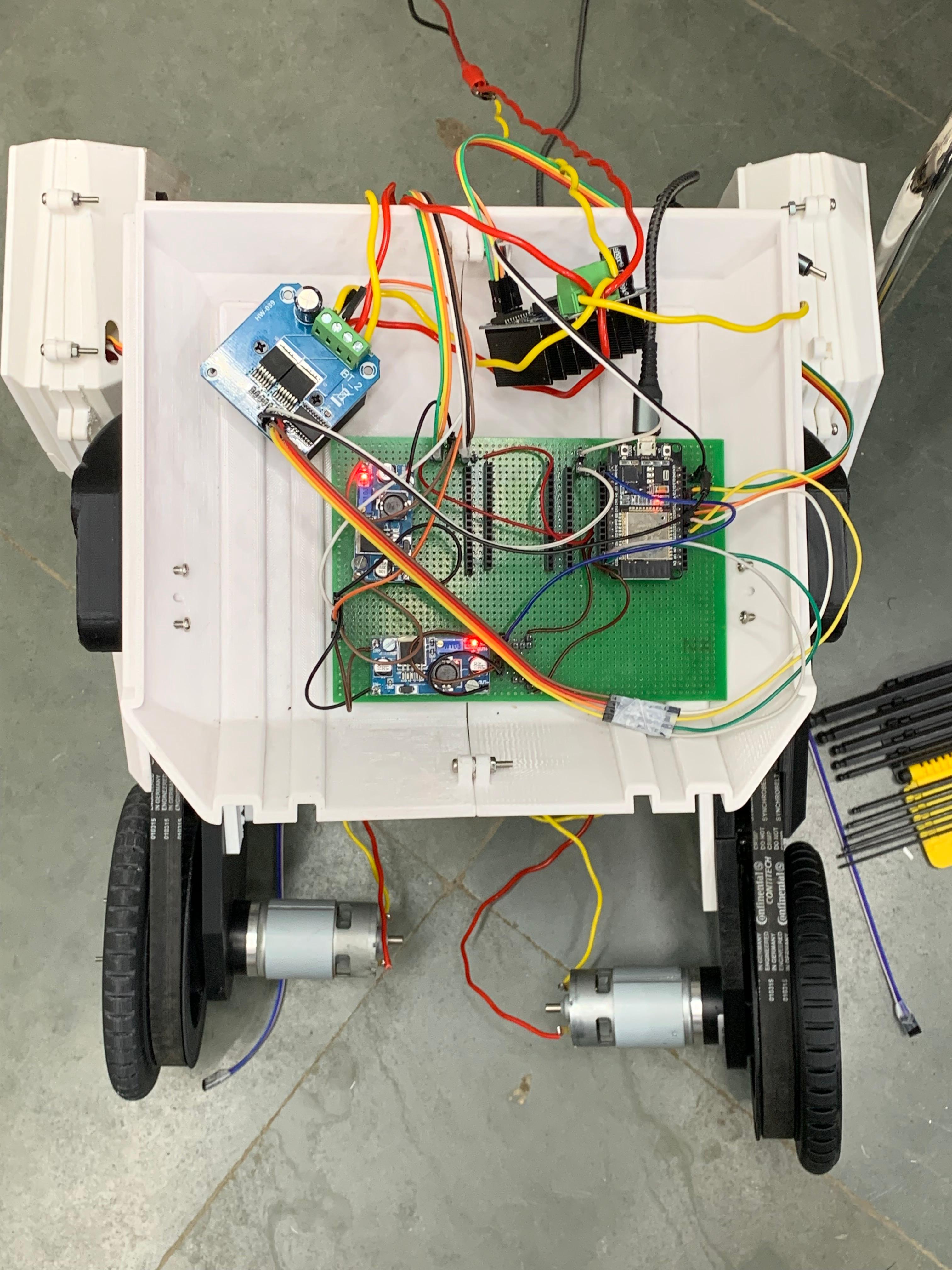
PCB for the Wheelchair.

Assembled Bot.

Assembled half-scale model of the stair-climbing wheelchair.
Simulation of the wheelchair in Gazebo.
Technical Details
- CAD Import & URDF: The provided CAD model was converted to URDF and imported into Gazebo, ensuring all links and joints matched the physical design.
- Kinematics: Forward and inverse kinematics were applied to calculate joint angles for stair climbing and sitting/standing motions.
- Simulation: The robot was simulated in Gazebo for physics-based testing and in RVIZ for visualization. Sensors (IMU, joint encoders) and actuators (motors) were added in the simulation.
- IMU Plugin: Integrated the Gazebo IMU plugin to provide realistic orientation and acceleration data for the robot in simulation.
- Teleoperation: Developed scripts to teleoperate the robot in simulation, allowing manual control for testing and demonstration.
- Physical Assembly: Assisted in 3D printing custom parts and assembling the half-scale model, which could perform sit and stand actions.
Project Impact
The successful simulation and assembly of the half-scale wheelchair model played a key role in demonstrating the feasibility of the design. With this working prototype, Nishcorp Technologies was able to secure ₹13 lakh in grants to continue developing their full-scale autonomous stair-climbing wheelchair.