MARIO: 3DOF Robotic Arm
View on GitHubProject Overview
MARIO is a 3-DOF robotic manipulator that serves as the perfect teaching tool for robotics students at SRA. I enhanced and modernized this existing project by porting it from old Gazebo Classic to the latest Gazebo Fortress and added new control features.
MARIO in Action

MARIO robotic arm performing precise movements
What I Enhanced
- Simulation Upgrade: Migrated from deprecated Gazebo Classic to modern Gazebo Fortress
- Control System: Implemented new teleop controller for easier operation
- Hardware Integration: Improved ESP32 and micro-ROS integration
- Educational Focus: Made it more user-friendly for ROS2 workshops
Physical Robot
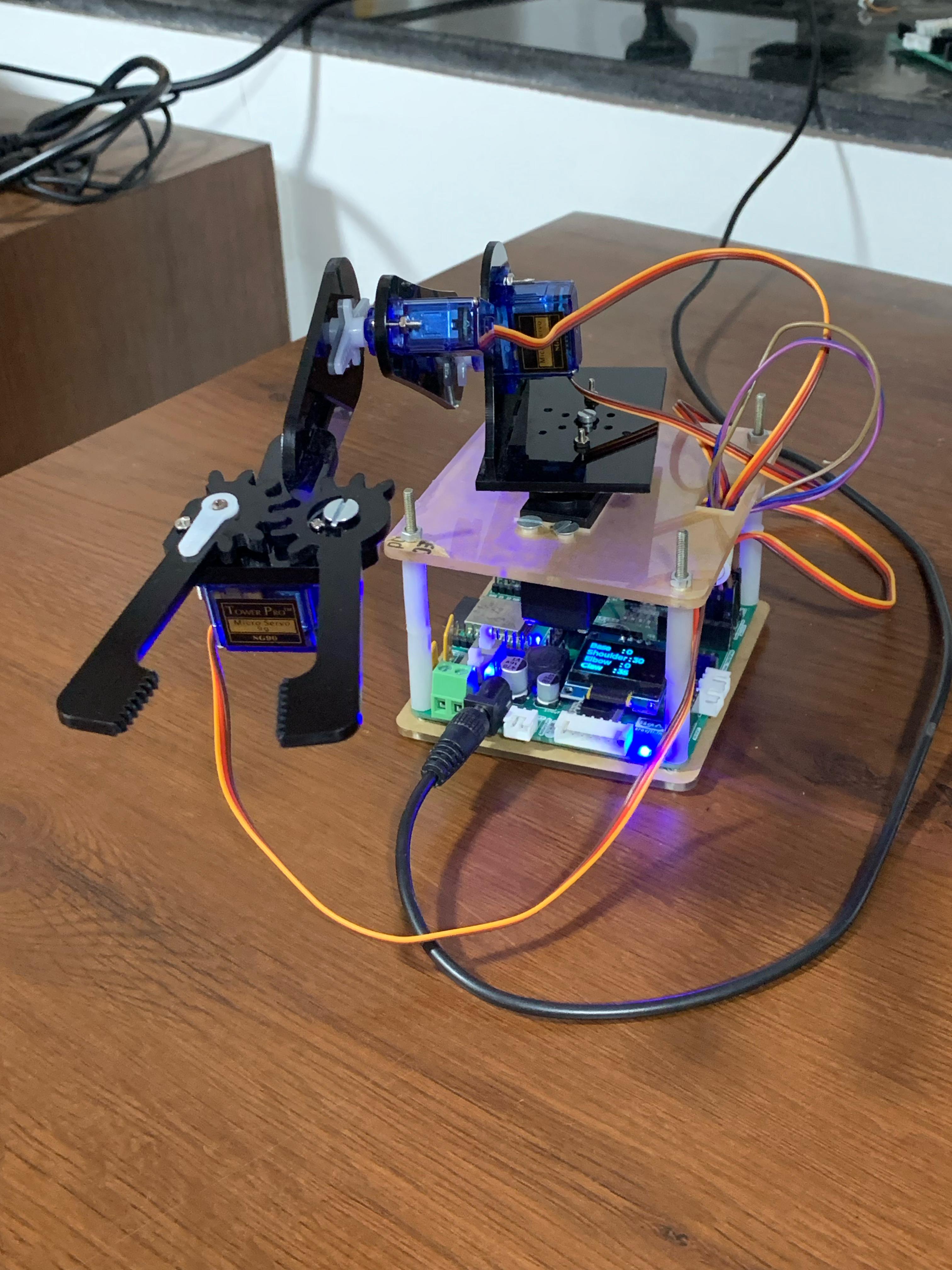
Physical MARIO robot with ESP32 control system
Hardware Features
The physical MARIO robot combines robust mechanical design with modern electronics:
- 3 degrees of freedom for versatile manipulation tasks
- ESP32 microcontroller for real-time control
- Precise servo motors for accurate positioning
- micro-ROS integration for seamless ROS2 communication
Enhanced Simulation
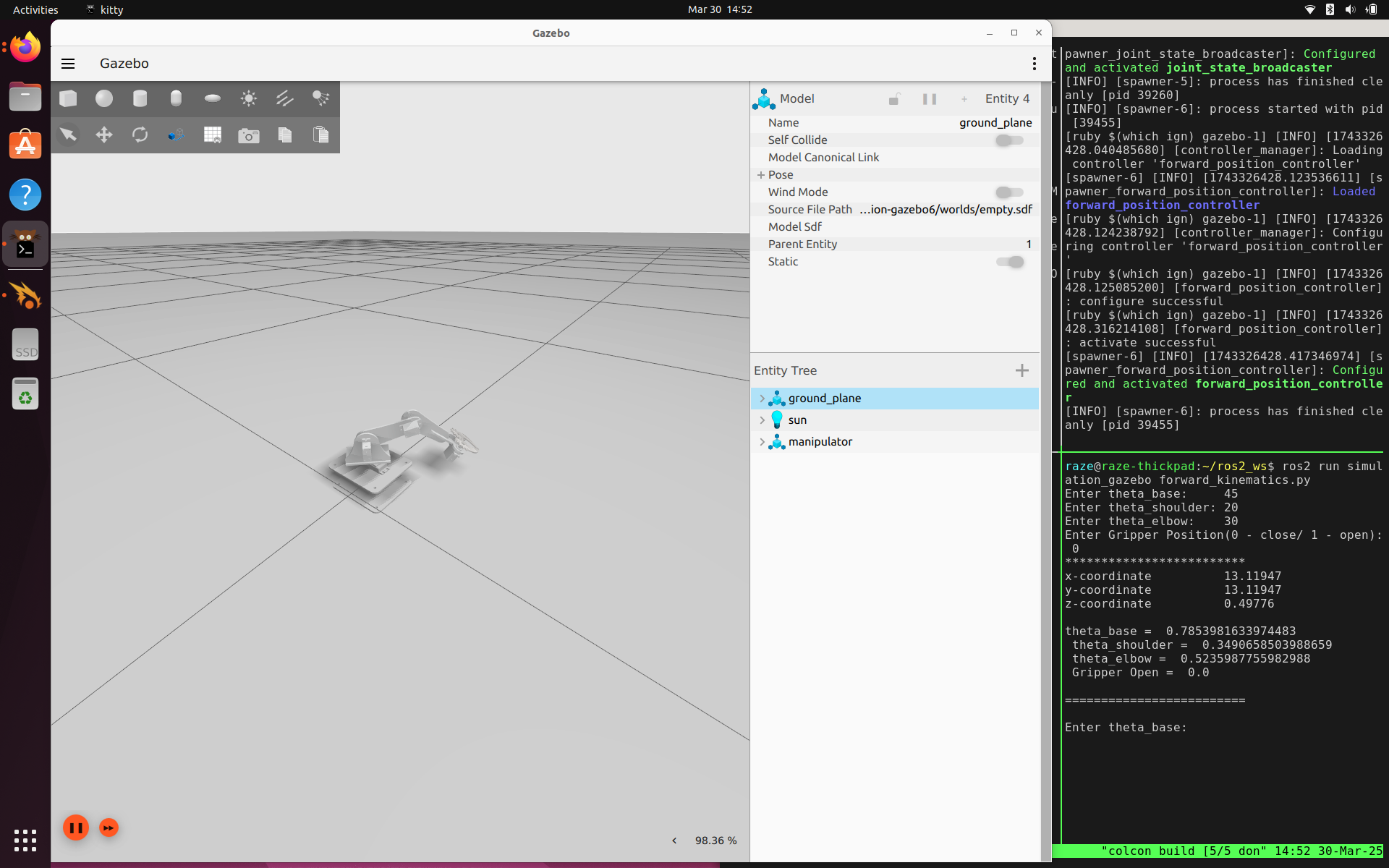
MARIO simulation environment in Gazebo Fortress
Simulation Improvements
The upgraded simulation provides a much better learning experience:
- Modern Gazebo Fortress with improved physics engine
- Better rendering and visualization capabilities
- Enhanced collision detection and dynamics
- Improved sensor simulation for realistic behavior
Advanced Control Features

Enhanced simulation with improved physics and teleop controls
Technical Features
- 3 degrees of freedom for versatile manipulation
- ESP32 microcontroller for real-time control
- micro-ROS integration for seamless ROS2 communication
- Precise servo motor control for accurate positioning
- Modern Gazebo Fortress simulation environment
- Teleop controller for easy manual operation
Built With
How It Works
The MARIO system works in two main modes:
- Simulation Mode: Run complete simulations in Gazebo Fortress for testing and learning
- Physical Mode: Control the real robot using ESP32 with micro-ROS for precise movements
Students can learn ROS2 concepts, practice robot programming, and see their code work both in simulation and on real hardware.
Challenges Solved
- Gazebo Migration: Successfully ported from deprecated Gazebo Classic to modern Gazebo Fortress
- Control System Upgrade: Improved servo control precision using ESP32 and micro-ROS
- User Experience: Added teleop controller to make the robot easier to operate for beginners
- Workshop Integration: Made the system more suitable for teaching ROS2 concepts
Impact
MARIO is now actively used in SRA's ROS2 workshops, helping students learn robotics concepts through hands-on experience. The enhanced simulation and improved controls make it an excellent educational tool for the next generation of robotics engineers.